Stanovení polohy těžiště hmotnostního sytému.
Tato metoda umožňuje experimentální určení polohy těžiště hmotnostního bodu, nebo systému, v souřadnicích x - y, pomocí reakčních sil, naměřených pomocí snímačů sil, podložených v každém rohu podložky.
Využití metody:
- pro určení polohy těžiště vozidel, vagonu vlaků, letadel, atd.
- pro vystředění součástek a kontrola kvality výroby součástek
- pro výpočet polohy prvku na podložce
- pro stanovení polohy a pohybu zvířete po plošině
- pro ochranný systém včasného varování proti nebezpečí převrácení např. u vysokozdvižných plošin, vozíků, jeřábů, nádrží, sil, atd.
- pro kalibrace tlumičů u sportovních vozidel
- pro testy biomechaniky, např.:
- na zjištění těžiště pohybující se osoby,
- na pohybové, balanční aj. testy
- pro zjištění místa dotyku na velkoplošných, na tlak citlivých obrazovkách.
LINEÁRNÍ METODA
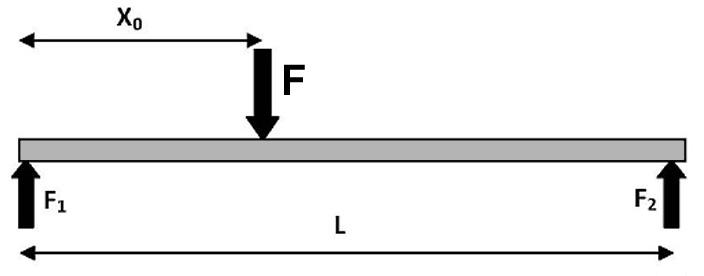
Snímače sil se uloží pod každý konec podélné tyče o délce L a změří se jednotlivě síly F1 a F2 na každém konci tyče. Celková síla musí být F = F1 + F2.
Poloha těžiště X0 potom je:
X0 = L . F2 / (F1 + F2)
pokud je délka tyče normovaná na 1, obdržíme jednotkový poměr:
X'0 = F2 / (F1 + F2)
DVOUROZMĚRNÝ MODEL
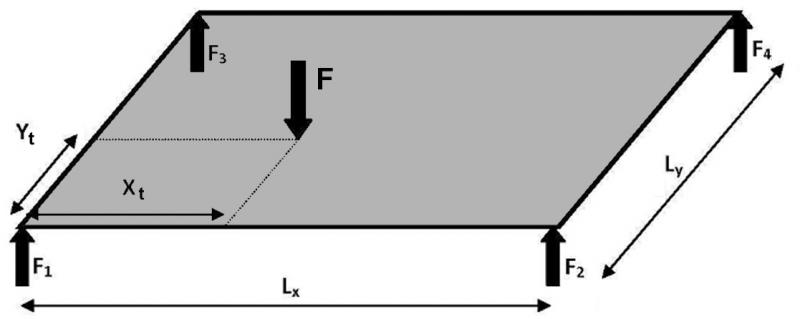
Snímače sil se uloží pod každý roh podložky o rozměrech Lx a Ly a změří se jednotlivé síly F1, F2, F3 a F4 v každém rohu podložky. Celková síla, po vytárování podložky, musí být F = F1 + F2 + F3 + F4.
Souřadnice těžiště Xta Yt potom jsou:
Xt = Lx. (F2 + F4) / (F1 + F2 + F3 + F4)
Yt = Ly. (F3 + F4) / (F1 + F2 + F3 + F4)
Pokud rozměry podložky jsou normované na 1, obdržíjme jednotkový poměr:
X't = (F2 + F4) / (F1 + F2 + F3 + F4)
Y't = (F3 + F4) / (F1 + F2 + F3 + F4)
Přesnost výsledku měření:
Zaokrouhlením výsledku výpočtu na dvě desetinná místa, obdržíme relativní rozlišení (rastr) o:
-
100 polohových bodech na ose vzdálenosti mezi snímači,
-
10.000 bodů na ploše podložky u dvourozměrného modelu.
Použitím přesných snímačů sil, společně s kvalitním mechanickým provedením
a pokud bychom využili tři desetinná místa výsledku, docílíme rozlišení:
-
1.000 bodů na ose vzdálenosti mezi snímači a
-
1.000.000 bodů na ploše podložky u dvourozměrného modelu.